Robotergesetze
Der Traum vom künstlichen Menschen hat sich in unzähligen Varianten wiederholt, gewandelt und modernisiert. Immer neue Techniken ermöglichten den Bau und die Konstruktion neuer Maschinen, Automaten und Roboter, die heute in Industrie und Haushalt zum Einsatz kommen.
Der französische Ingenieur und Erfinder Jacques de Vaucanson erlangte Berühmtheit durch die Konstruktion von Automaten (er lebte von 1709-1782 in Paris). So baute er unter anderem einen mechanischen Flötenspieler, der zwölf verschiedene Lieder spielen konnte, sich dabei drehen und bewegen konnte. Die dahinter stehenden Techniken waren eine mechanische Stiftwalze mit zwei Bewegungsrichtungen und ein Schneckengetriebe. Vaucansons Traum war es, einen möglichst umfassend funktionierenden Menschen zu bauen.
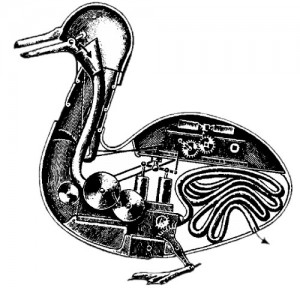
Bekannt wurde er aber insbesondere durch seine mechanische Ente. Diese bestand aus 400 beweglichen Einzelteilen, die Ente konnte mit den Flügeln flattern, konnte schnattern und Wasser trinken. Insbesondere verfügte sie über ein Verdauungssystem: in einer chemischen Reaktion schied sie mittels eines künstlichen Darms naturgetreu aufgenommene Konsistenzen aus.
Roboter und ihre Gesetze
Der Begriff Roboter wurde erstmals in R.U.R – Rossum’s Universal Robots, einem 1921 erschienen Drama des Schriftstellers Karel Čapek erwähnt. Der Erzählung nach stellt das Unternehmen R.U.R. künstliche Menschen her, deren massiver Einsatz in der Industrie die Weltwirtschaft verändert. Im Laufe des Dramas erheben sich die Kunstmenschen jedoch gegen die Menschheit.
Das Verhältnis zwischen Robotern und Menschen wurde zunehmend zum Gegenstand literarischer Arbeiten.
Der Science-Fiction Autor Isaac Asimov hat dieses Thema aufgegriffen. In der Kurzgeschichte Runaround von 1942 hat er erstmals die Grundregeln des Roboterdienstes beschrieben.
Die Asimovschen Gestze in der ersten Variante lauten:
- Ein Roboter darf kein menschliches Wesen (wissentlich) verletzen oder durch Untätigkeit gestatten, dass einem menschlichen Wesen (wissentlich) Schaden zugefügt wird.
- Ein Roboter muss den ihm von einem Menschen gegebenen Befehlen gehorchen – es sei denn, ein solcher Befehl würde mit Regel eins kollidieren.
- Ein Roboter muss seine Existenz beschützen, solange dieser Schutz nicht mit Regel eins oder zwei kollidiert.
Die Gesetze sind hierarchisch aufgebaut.
In der Trilogie um den Roboter Caliban werden die drei Gesetze verworfen und die „neuen Gesetze“ entstehen. Sie lauten:
- Ein Roboter darf keinen Menschen verletzen.
- Ein Roboter ist verpflichtet, mit Menschen zusammenzuarbeiten, es sei denn, diese Zusammenarbeit stünde im Widerspruch zum Ersten Gesetz.
- Ein Roboter muss seine eigene Existenz schützen, so lange er dadurch nicht in einen Konflikt mit dem Ersten Gesetz gerät.
- Ein Roboter hat die Freiheit zu tun, was er will, es sei denn, er würde dadurch gegen das Erste, Zweite oder Dritte Gesetz verstoßen.
Maschinenrichtlinie
Die heute existierenden Regelungen für Industrie- und Haushaltroboter sind aus diesen Konzeptionen nicht ableitbar. Sie sind vielmehr an verschiedenen Sicherheitsnormen orientiert. Die Richtlinie 2006/42/EG des europäischen Parlaments und des Rates vom 17. Mai 2006 über Maschinen und zur Änderung der Richtlinie 95/16/EG (Maschinenrichtlinie) regelt ein einheitliches Schutzniveau zur Unfallverhütung für Maschinen beim Inverkehrbringen innerhalb des europäischen Wirtschaftsraums.
Eine Definition des Begriffs „Maschine“ findet sich in Art 2 der RL 2006/42/EG.
Unter den Begriff der Maschine fällt:
- eine mit einem anderen Antriebssystem als der unmittelbar eingesetzten menschlichen oder tierischen Kraft ausgestattete oder dafür vorgesehene Gesamtheit miteinander verbundener Teile oder Vorrichtungen, von denen mindestens eines bzw. eine beweglich ist und die für eine bestimmte Anwendung zusammengefügt sind;
- eine Gesamtheit von Maschinen oder von unvollständigen Maschinen, die, damit sie zusammenwirken, so angeordnet sind und betätigt werden, dass sie als Gesamtheit funktionieren;
- eine Gesamtheit miteinander verbundener Teile oder Vorrichtungen, von denen mindestens eines bzw. eine beweglich ist und die für Hebevorgänge zusammengefügt sind und deren einzige Antriebsquelle die unmittelbar eingesetzte menschliche Kraft ist.
Abb.: Wikipedia/gemeinfrei; TS/gemeinfrei.
@UBIFACTS/2013